

 联系我们
联系我们

通用输入/输出可以达到让机器人控制外部设备&接收外部设备信号的效果,但大多场景下我们还需要将机器人当前状态传输给上位设备(通常为PLC和工控机)并由上位设备控制abb机器人部分动作,从而实现远程控制。此时就需要用到系统输入/输出,abb机器人常用的系统输入&输出如下表所示:

 将以上系统输入/输出映射至通用输入输出的详细步骤如下:
将以上系统输入/输出映射至通用输入输出的详细步骤如下:
1.点击“abb机器人主菜单”,选择“控制面板” 点击“配置”,主题选择“I/O”
点击“配置”,主题选择“I/O”
 3.再此以配置一个系统输出为例,点击“System Input”
3.再此以配置一个系统输出为例,点击“System Input”
 点击“添加”
点击“添加”
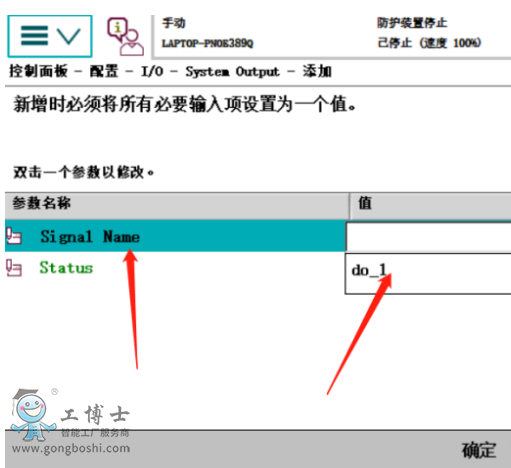
 点击“Signal Name”,选择需要映射至的通用输出
点击“Signal Name”,选择需要映射至的通用输出
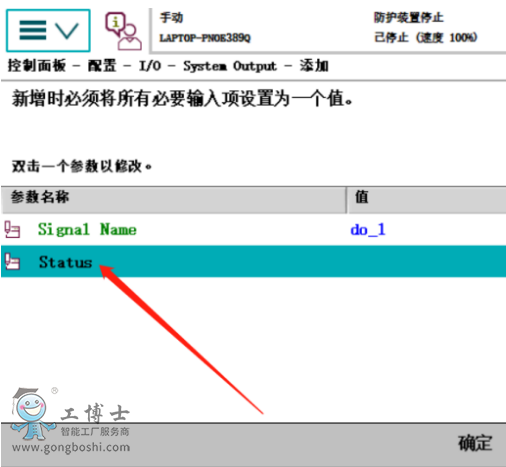
 点击“Status”选择事件
点击“Status”选择事件
 此处以“Motor On” 为例,选择后点击“确认”
此处以“Motor On” 为例,选择后点击“确认”
 再次点击“确认”后弹出如下对话框,点击“是”,重启后生效
再次点击“确认”后弹出如下对话框,点击“是”,重启后生效

更多机器人资讯请点击:http://abb-industrial-robot.gongboshi.com/
1.点击“abb机器人主菜单”,选择“控制面板”
更多机器人资讯请点击:http://abb-industrial-robot.gongboshi.com/
